简介
接上文,首先回顾一下IBinder相关接口的类图:
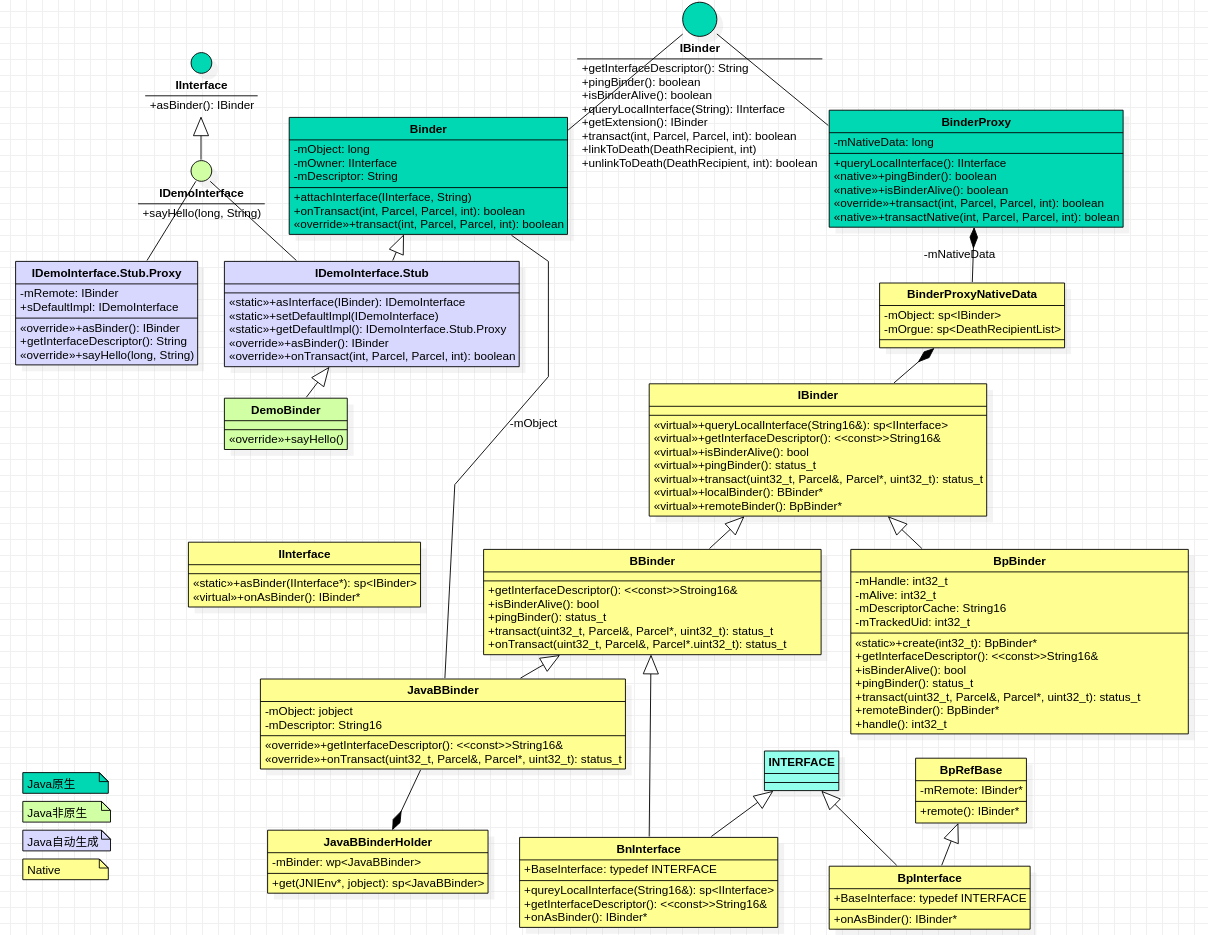
我们知道在Client App中获取的IBinder实际上是BinderProxy类型的对象。那么在上一文中Client App调用sayHello方法过程的的#2.3.2中,我们卡住了,现在可以继续了:
1
2
3
4
| virtual status_t transact( uint32_t code,
const Parcel& data,
Parcel* reply,
uint32_t flags = 0) = 0;
|
一. IBinder.transact
- Service.onServiceConnected
- IDemoInterface.Stub.Proxy.sayHello
- BinderProxy.transact(Stub.TRANSACTION_sayHello, ……)
1.1 BinderProxy.transact
1
2
3
4
5
6
7
8
| public boolean transact(int code, Parcel data, Parcel reply, int flags) throws RemoteException {
try {
return transactNative(code, data, reply, flags);
}
}
|
1.2 android_util_Binder#android_os_BinderProxy_transact
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
| static jboolean android_os_BinderProxy_transact(JNIEnv* env, jobject obj,
jint code, jobject dataObj, jobject replyObj, jint flags)
{
IBinder* target = getBPNativeData(env, obj)->mObject.get();
status_t err = target->transact(code, *data, reply, flags);
return JNI_FALSE;
}
|
1.3 BpBinder#transact
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
|
status_t BpBinder::transact(
uint32_t code, const Parcel& data, Parcel* reply, uint32_t flags)
{
if (mAlive) {
status_t status = IPCThreadState::self()->transact(
mHandle, code, data, reply, flags);
if (status == DEAD_OBJECT) mAlive = 0;
return status;
}
return DEAD_OBJECT;
}
|
1.4 IPCThreadState#transact
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
| status_t IPCThreadState::transact(int32_t handle,
uint32_t code, const Parcel& data,
Parcel* reply, uint32_t flags)
{
status_t err;
flags |= TF_ACCEPT_FDS;
err = writeTransactionData(BC_TRANSACTION, flags, handle, code, data, nullptr);
if ((flags & TF_ONE_WAY) == 0) {
if (reply) {
err = waitForResponse(reply);
} else {
Parcel fakeReply;
err = waitForResponse(&fakeReply);
}
} else {
err = waitForResponse(nullptr, nullptr);
}
return err;
}
|
transaction的flag一共有四种:
| name |
value |
function |
| TF_ONE_WAY |
0x01 |
代表oneway的binder调用,不需要回传数据 |
| TF_ROOT_OBJECT |
0x04 |
内容是组件的根对象 |
| TF_STATUS_CODE |
0x08 |
内容是32位的状态代码 |
| TF_ACCEPT_FDS |
0x10 |
允许使用文件描述符答复 |
首先将需要传递的数据写入out中存储,然后去和binder driver通信。
这里我们先忽略IPCThreadState的初始化过程。
1.4.1 IPCThreadState#writeTransactionData
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
| status_t IPCThreadState::writeTransactionData(int32_t cmd, uint32_t binderFlags,
int32_t handle, uint32_t code, const Parcel& data, status_t* statusBuffer)
{
binder_transaction_data tr;
tr.target.ptr = 0;
tr.target.handle = handle;
tr.code = code;
tr.flags = binderFlags;
tr.cookie = 0;
tr.sender_pid = 0;
tr.sender_euid = 0;
const status_t err = data.errorCheck();
if (err == NO_ERROR) {
tr.data_size = data.ipcDataSize();
tr.data.ptr.buffer = data.ipcData();
tr.offsets_size = data.ipcObjectsCount()*sizeof(binder_size_t);
tr.data.ptr.offsets = data.ipcObjects();
}
mOut.writeInt32(cmd);
mOut.write(&tr, sizeof(tr));
return NO_ERROR;
}
|
这里折后就是将数据保存在mOut中,这里是怎么保证多线程并发的时的处理呢?稍后我们研究IPC的初始化就知道了。
1.5 IPCThreadState#waitForResponse
从名字也可以猜出来,这里应该就是与binder.c驱动通信。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
| status_t IPCThreadState::waitForResponse(Parcel *reply, status_t *acquireResult)
{
uint32_t cmd;
int32_t err;
while (1) {
if ((err=talkWithDriver()) < NO_ERROR) break;
cmd = (uint32_t)mIn.readInt32();
switch (cmd) {
case BR_TRANSACTION_COMPLETE:
if (!reply && !acquireResult) goto finish;
break;
case BR_DEAD_REPLY:
err = DEAD_OBJECT;
goto finish;
case BR_FAILED_REPLY:
err = FAILED_TRANSACTION;
goto finish;
case BR_ACQUIRE_RESULT:
{
ALOG_ASSERT(acquireResult != NULL, "Unexpected brACQUIRE_RESULT");
const int32_t result = mIn.readInt32();
if (!acquireResult) continue;
*acquireResult = result ? NO_ERROR : INVALID_OPERATION;
}
goto finish;
case BR_REPLY:
{
binder_transaction_data tr;
err = mIn.read(&tr, sizeof(tr));
ALOG_ASSERT(err == NO_ERROR, "Not enough command data for brREPLY");
if (err != NO_ERROR) goto finish;
if (reply) {
if ((tr.flags & TF_STATUS_CODE) == 0) {
reply->ipcSetDataReference(
reinterpret_cast<const uint8_t*>(tr.data.ptr.buffer),
tr.data_size,
reinterpret_cast<const binder_size_t*>(tr.data.ptr.offsets),
tr.offsets_size/sizeof(binder_size_t),
freeBuffer, this);
} else {
err = *reinterpret_cast<const status_t*>(tr.data.ptr.buffer);
freeBuffer(nullptr,
reinterpret_cast<const uint8_t*>(tr.data.ptr.buffer),
tr.data_size,
reinterpret_cast<const binder_size_t*>(tr.data.ptr.offsets),
tr.offsets_size/sizeof(binder_size_t), this);
}
} else {
freeBuffer(nullptr,
reinterpret_cast<const uint8_t*>(tr.data.ptr.buffer),
tr.data_size,
reinterpret_cast<const binder_size_t*>(tr.data.ptr.offsets),
tr.offsets_size/sizeof(binder_size_t), this);
continue;
}
}
goto finish;
default:
err = executeCommand(cmd);
if (err != NO_ERROR) goto finish;
break;
}
}
finish:
if (err != NO_ERROR) {
if (acquireResult) *acquireResult = err;
if (reply) reply->setError(err);
mLastError = err;
}
return err;
}
|
1.6 IPCThreadState#talkWithDriver
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
| status_t IPCThreadState::talkWithDriver(bool doReceive)
{
if (mProcess->mDriverFD < 0) {
return -EBADF;
}
binder_write_read bwr;
const bool needRead = mIn.dataPosition() >= mIn.dataSize();
const size_t outAvail = (!doReceive || needRead) ? mOut.dataSize() : 0;
bwr.write_size = outAvail;
bwr.write_buffer = (uintptr_t)mOut.data();
if (doReceive && needRead) {
bwr.read_size = mIn.dataCapacity();
bwr.read_buffer = (uintptr_t)mIn.data();
} else {
bwr.read_size = 0;
bwr.read_buffer = 0;
}
do {
if (ioctl(mProcess->mDriverFD, BINDER_WRITE_READ, &bwr) >= 0)
err = NO_ERROR;
else
err = -errno;
if (mProcess->mDriverFD < 0) {
err = -EBADF;
}
IF_LOG_COMMANDS() {
alog << "Finished read/write, write size = " << mOut.dataSize() << endl;
}
} while (err == -EINTR);
if (err >= NO_ERROR) {
if (bwr.read_consumed > 0) {
mIn.setDataSize(bwr.read_consumed);
mIn.setDataPosition(0);
}
return NO_ERROR;
}
return err;
}
|
ok, 到这里我们对Binder通信已经有了一个初步的认知,最核心跨进程的通信手段是通过ioctl这个东东。
二. ioctl介绍
本身对Linux内核驱动不太了解,可以参考这篇博文: https://blog.csdn.net/qq_19923217/article/details/82698787
ioctl()系统调用操作特殊文件的底层设备参数。特别是,字符特殊文件(例如终端)的许多操作特性可以通过ioctl()请求来控制。
ioctl 是设备驱动程序中设备控制接口函数,一个字符设备驱动通常会实现设备打开、关闭、读、写等功能,在一些需要细分的情境下,如果需要扩展新的功能,通常以增设 ioctl() 命令的方式实现。
| 参数 |
描述 |
| fd |
文件描述符 |
| cmd |
交互协议,设备驱动将根据 cmd 执行对应操作 |
| … |
可变参数 arg,依赖 cmd 指定长度以及类型 |
2.1 API
- 头文件: #include <sys/ioctl.h>, 用于指定ioctl()请求的宏和定义位于文件<sys/ioctl.h>中。
- 参数: int ioctl(int fd, unsigned long request, …);
- fd 必须是打开文件描述符。
- cmd 是依赖于设备的请求代码, 即交互协议,设备驱动将根据 cmd 执行对应操作
- argp(…) 是指向内存的非类型指针, 它传统上是char*argp, ioctl()请求在其中编码了参数是in参数还是out参数,参数argp的大小以字节为单位。
- 返回值: ioctl() 函数执行成功时返回 0,失败则返回 -1 并设置全局变量 errorno 值
- EBADF fd不是有效的文件描述符。
- EFAULT 默认argp引用不可访问的内存区域。
- EINVAL 请求或argp无效。
- ENOTTY fd与字符专用设备不关联。
- ENOTTY 指定的请求不适用于文件描述符fd引用的对象类型。
2.2 ioctl用户与驱动之间的协议
参考:https://blog.csdn.net/zifehng/article/details/59576539
总结
通过这个sayHello的过程,我们对binder通信有了基本概念。知道BBinder, BpBinder, IBinder, IInterface等等类的作用。
接下来我们先看看Binder驱动的加载过程,之后在继续分析ioctl接下来的流程:比如Client发送请求后,binder驱动是怎么找到对应Server的。
参考资料
- Android Binder详解 https://mr-cao.gitbooks.io/android/content/android-binder.html
- msm-4.14 Code https://github.com/android-linux-stable/msm-4.14/blob/9c4b6ed1b229cfc35e5c3e5815e297b7f519cf93/drivers/android/binder.c
- linux 内核 - ioctl 函数详解 https://blog.csdn.net/qq_19923217/article/details/82698787
- ioctl(2) — Linux manual page https://man7.org/linux/man-pages/man2/ioctl.2.html
- ioctl()分析——从用户空间到设备驱动 https://blog.csdn.net/zifehng/article/details/59576539